Công Nghệ Định Vị Chính Xác Trong Cầu Trục Rót Thép Tự Động

Th6
Sau một sự cố mất điện tại khu vực lò luyện, cầu trục rót thép khởi động lại — nhưng PLC không còn biết thiết bị đang đứng ở đâu. Quy trình homing thủ công bắt đầu. Dây chuyền dừng chờ. Mỗi phút dừng lò là chi phí vận hành thực tế tính được.
Đây không phải tình huống hiếm gặp trong các nhà máy thép chưa triển khai định vị tuyệt đối. Và đây cũng không phải rủi ro duy nhất: khi encoder tương đối tích lũy sai số qua hàng nghìn chu kỳ vận hành trong môi trường bụi graphite và rung động liên tục, hệ thống có thể “nghĩ” cầu trục đang ở một vị trí khác so với thực tế — mà không có bất kỳ cảnh báo nào trước khi sự cố xảy ra.
Với cầu trục rót thép đang mang 150 tấn thép lỏng ở 1.600 °C, đó là rủi ro không thể chấp nhận. Bài viết này của VINALIFT phân tích kiến trúc định vị chính xác trong cầu trục rót thép tự động — từ Encoder Fusion, Barcode đến Zone Interlocking và tích hợp CMS-SCADA-MES — những lớp kỹ thuật quyết định liệu hệ thống có thể vận hành ổn định xuyên suốt vòng đời dự án hay không.
Vận hành cầu trục bằng công nghệ định vị chính xác
Trong các dự án cầu trục rót thép, chúng tôi nhận thấy một điểm rất rõ: khi hệ thống chuyển từ vận hành cabin truyền thống sang điều khiển từ xa hoặc bán tự động, vấn đề không còn là người vận hành “nhìn thấy tải” nữa.
Vấn đề là hệ thống có đủ dữ liệu để ra quyết định an toàn hay không.
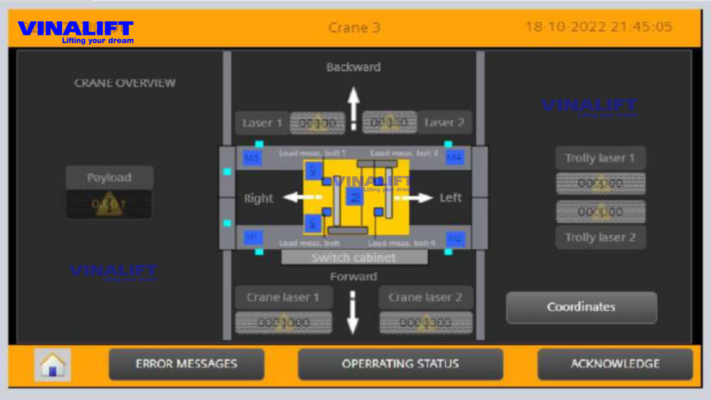
Một cầu trục rót thép hiện đại phải luôn biết chính xác nó đang ở đâu, xe con đang ở vị trí nào, móc cẩu đang ở cao độ nào và khu vực phía trước có được phép đi vào hay không. Nếu thiếu lớp dữ liệu vị trí này, các chức năng như Go-To Position, Anti-Sway, Zone Interlocking hay vận hành cabinless đều không thể hoạt động ổn định.
Nói cách khác, công nghệ định vị chính xác không phải một tính năng phụ. Nó là lớp nền để cầu trục bước từ thiết bị nâng hạ cơ khí sang một phần của hệ thống tự động hóa nhà máy thép.

Những giới hạn của hệ thống định vị truyền thống
Trong các nhà máy thông thường, encoder tương đối vẫn có thể đáp ứng tốt nhiều bài toán vận hành. Nhưng trong môi trường luyện kim, chúng tôi thường gặp một vấn đề lặp đi lặp lại: bánh xe quay, encoder vẫn đếm xung, nhưng cầu trục không di chuyển đúng như dữ liệu ghi nhận.
Nguyên nhân đến từ điều kiện ray và môi trường vận hành: bụi kim loại, bụi graphite, xỉ thép, dầu mỡ công nghiệp và rung động liên tục. Chỉ cần bánh xe trượt nhẹ trong một số chu kỳ, sai số vị trí đã bắt đầu xuất hiện.
Điều đáng ngại là sai số này không dừng lại ở một lần vận hành. Nó tích lũy theo thời gian. Sau hàng nghìn chu kỳ, hệ thống có thể “nghĩ” rằng cầu trục đang ở một vị trí khác so với thực tế.
Với cầu trục rót thép, đây là rủi ro không thể xem nhẹ.

Kiến trúc định vị tuyệt đối trong cầu trục rót thép
Bài học lớn trong các dự án cầu trục luyện kim là: hệ thống không nên chỉ biết nó đã di chuyển bao xa, mà phải biết nó đang thực sự đứng ở đâu.
Đó là lý do định vị tuyệt đối trở thành nền tảng quan trọng trong cầu trục rót thép tự động.
Khi xảy ra mất điện, dừng bảo trì hoặc PLC khởi động lại, hệ thống vẫn phải xác định được vị trí thực tế mà không cần đưa cầu trục về điểm gốc để homing. Đây là yêu cầu thiết kế bắt buộc trong các hệ thống cầu trục luyện kim vận hành ở chế độ A8 – cấp sử dụng cao nhất theo FEM 1.001 – nơi mỗi lần gián đoạn dây chuyền đều có chi phí cơ hội đo bằng tấn thép không sản xuất được.
Với định vị tuyệt đối, cầu trục đủ điều kiện triển khai các chức năng kiểm soát an toàn theo EN 13135 (tiêu chuẩn thiết bị điều khiển và an toàn trong cơ cấu nâng): Go-To Position, Zone Interlocking, Anti-Collision và vận hành không cabin. Đây cũng là nền tảng để tích hợp hệ thống theo dõi trạng thái dài hạn (CMS) phục vụ bảo trì dự đoán theo ISO 12482.
Một yêu cầu thực tế thường bị bỏ qua trong Technical Specification: hệ thống phải xác định được vị trí tuyệt đối ngay sau khi cấp nguồn trở lại — không cần đưa cầu trục về điểm gốc để homing. Trong kiến trúc RCOS tích hợp trên cầu trục rót thép VINALIFT, khi PLC khởi động lại sau sự cố mất điện, hệ thống đọc tọa độ thực tế từ barcode dọc đường ray và xác nhận vị trí trong vòng vài giây. Dây chuyền không phải chờ cầu trục chạy về điểm gốc — một thao tác có thể mất 5 đến 10 phút trong nhà xưởng dài 100m vận hành A8.
Xem thêm: [Hồ sơ tham chiếu dự án cầu trục rót thép] – cẩu thép được trang bị hệ thống định vị tuyệt đối (Absolute Positioning) sử dụng công nghệ mã vạch dải thép không gỉ (BPS) chạy dọc nhà xưởng
Độ chính xác định vị điển hình trong nhà máy thép
Câu hỏi chúng tôi thường nhận được từ các EPC Contractor là: “Độ chính xác bao nhiêu thì đủ cho cầu trục rót thép tự động?”
Câu trả lời không nằm ở con số milimet đơn lẻ – mà ở chế độ làm việc của thiết bị. Cầu trục rót thép vận hành liên tục trong nhà máy thép là chế độ A8 theo FEM 1.001: cường độ sử dụng cao nhất, phổ tải trọng nặng nhất. Ở cấp này, yêu cầu định vị không phải là đạt sai số trong điều kiện lý tưởng – mà là duy trì sai số đó sau hàng triệu chu kỳ vận hành trong môi trường bụi graphite dẫn điện, nhiệt bức xạ cao và rung động liên tục.
Đây chính là lý do kiến trúc đa lớp, Encoder Fusion được lựa chọn thay vì cảm biến đơn lẻ. Không phải vì một cảm biến không đủ chính xác ban đầu, mà vì không có cảm biến nào đảm bảo duy trì độ chính xác đó xuyên suốt vòng đời vận hành ở cấp A8.
- Ngành thép – Cầu trục dầm đôi 80/20 tấn – Khu liên hợp sản xuất gang thép Hòa Phát Dung Quất
- Ngành thép – Cầu trục dầm đôi 40/10 tấn – Nhà máy thép Danieli Argentina
Kiến trúc encoder fusion: Laser – Barcode – Encoder
Trong thực tế, các hệ thống cao cấp hiếm khi sử dụng một công nghệ đơn lẻ. Thay vào đó, các nhà sản xuất Smart Crane thường áp dụng kiến trúc đa lớp nhằm đảm bảo độ tin cậy dài hạn.
Từ góc độ thiết kế hệ thống, câu hỏi quan trọng không phải là điều gì xảy ra khi mọi cảm biến đều hoạt động bình thường. Câu hỏi quan trọng hơn là hệ thống sẽ phản ứng như thế nào khi một nguồn tín hiệu bị suy giảm hoặc mất hoàn toàn. Đây là lý do kiến trúc đa lớp ngày càng được ưu tiên trong các dự án Smart Crane hiện đại.
Định vị bằng laser
Trong nhiều hệ thống, laser được sử dụng như một lớp tham chiếu vị trí có độ chính xác cao. Ưu điểm của laser là đo xa, phản hồi nhanh và không cần tiếp xúc cơ khí.
Tuy nhiên, khi triển khai trong môi trường luyện kim, chúng tôi không xem laser là câu trả lời duy nhất.
Khói nóng, bụi kim loại hoặc hơi nước ở một số khu vực có thể ảnh hưởng đến độ ổn định tín hiệu. Vì vậy, trong các cấu hình yêu cầu độ tin cậy cao, laser thường được kết hợp với encoder và barcode/Data Matrix để tạo thành kiến trúc định vị đa lớp.
Cách tiếp cận này giúp hệ thống không phụ thuộc vào một nguồn dữ liệu duy nhất.
Định vị bằng mã vạch
Với môi trường nhà máy thép, barcode hoặc Data Matrix bằng inox là một lớp xác thực vị trí rất đáng tin cậy.
Điểm mạnh của giải pháp này là nó không phụ thuộc vào việc bánh xe có trượt hay không. Mỗi mã được gắn với một tọa độ thực tế trên tuyến ray. Khi đầu đọc quét qua, hệ thống có thể xác nhận lại vị trí tuyệt đối và hiệu chỉnh sai số tích lũy từ encoder.
Trong thực tế triển khai, chúng tôi đánh giá cao giải pháp này không chỉ vì độ chính xác, mà vì khả năng duy trì độ chính xác đó trong môi trường bụi, rung và vận hành cường độ cao.
Encoder Fusion
Trong các dự án luyện kim, câu hỏi quan trọng không phải là điều gì xảy ra khi mọi cảm biến đều hoạt động bình thường. Câu hỏi quan trọng hơn là hệ thống sẽ phản ứng như thế nào khi một nguồn tín hiệu bị suy giảm hoặc mất hoàn toàn.
Một bài học chúng tôi rút ra từ thực tế triển khai là không nên thiết kế hệ thống định vị dựa trên giả định mọi cảm biến đều luôn hoạt động trong điều kiện lý tưởng. Thay vào đó, vị trí thực tế cần được xác nhận thông qua nhiều lớp dữ liệu khác nhau để duy trì độ tin cậy dài hạn ngay cả khi một nguồn tín hiệu bị ảnh hưởng bởi bụi, nhiệt hoặc rung động.
Đây cũng chính là triết lý đằng sau kiến trúc Encoder Fusion đang được áp dụng trong nhiều hệ thống Smart Crane hiện đại.
Go-To Position: Khi người vận hành chỉ cần chọn điểm đích
Go-To Position nghe có vẻ đơn giản: người vận hành chọn điểm đích, cầu trục tự di chuyển đến vị trí đó.
Nhưng để chức năng này hoạt động an toàn trong nhà máy thép, hệ thống phải xử lý đồng thời rất nhiều dữ liệu: vị trí cầu, vị trí trolley, cao độ móc, chiều dài cáp, trạng thái tải, vùng vận hành và điều kiện liên động.
Trong các ứng dụng như nhận thép từ EAF, trung chuyển tại LF hoặc đưa ladle tới CCM, giá trị của Go-To Position không chỉ nằm ở việc “đi đúng điểm”. Giá trị lớn hơn là giảm phụ thuộc vào kỹ năng cá nhân của người vận hành, tăng tính lặp lại của quy trình và tạo nền tảng cho cầu trục rót thép tự động.
Zone Interlocking và vùng cấm vận hành
Trong nhà máy thép, không phải khu vực nào cầu trục cũng được phép đi qua với cùng một điều kiện vận hành.
Có khu vực gần lò EAF, có khu vực bảo trì, có hành lang kỹ thuật, có vùng có người làm việc và có những khu vực thiết bị chỉ được phép đi vào khi đáp ứng đủ điều kiện an toàn.
Đây là lúc Zone Interlocking trở nên quan trọng.
Từ dữ liệu định vị tuyệt đối, PLC có thể xây dựng các vùng ảo trong không gian nhà xưởng. Khi cầu trục tiến gần vùng nhạy cảm, hệ thống có thể giảm tốc, cảnh báo, dừng hoặc từ chối lệnh điều khiển.
Điểm quan trọng là hệ thống không chờ người vận hành phát hiện rủi ro. Nó chủ động giới hạn rủi ro ngay từ tầng điều khiển.
Trong kiến trúc RCOS, Zone Interlocking được xây dựng theo nguyên tắc phòng thủ chủ động: hệ thống không chỉ dừng cầu trục khi vi phạm vùng cấm mà còn giảm tốc có kiểm soát khi tiếp cận ranh giới cảnh báo — tránh dừng đột ngột gây lắc tải. Khi cầu trục điều khiển từ xa (Cabinless) không có người trực tiếp quan sát từ cabin, đây là lớp bảo vệ không thể thiếu: hệ thống từ chối lệnh điều khiển sai trước khi người vận hành kịp phát hiện rủi ro trên màn hình camera.
Xem thêm: [Triết Lý Thiết Kế Không Chấp Nhận Điểm Lỗi Đơn]
Xem thêm: [Hệ thống phanh nhiều lớp trong cầu trục rót thép] — Zone Interlocking hoạt động phối hợp với hệ thống phanh Fail-Safe để tạo thành lớp bảo vệ tổng thể khi cầu trục tiếp cận vùng nguy hiểm
Bài học từ các dự án cầu trục rót thép thực tế
Một trong những bài học rõ nhất từ các dự án cầu trục rót thép là: độ chính xác định vị không chỉ phụ thuộc vào cảm biến, mà phụ thuộc vào toàn bộ môi trường xung quanh cảm biến.

Ví dụ, việc chuyển từ tủ điện khung hở sang tủ kín IP54/IP55 không phải là thay đổi hình thức. Trong môi trường luyện kim, bụi graphite có thể bám lên thanh cái, contactor, PLC hoặc biến tần, làm tăng nguy cơ phóng điện, chập mạch và dừng thiết bị ngoài kế hoạch.
Tương tự, camera quan sát tải trọng cũng không thể dùng loại camera dân dụng vỏ nhựa. Nhiệt bức xạ có thể làm biến dạng vỏ, trong khi bụi kim loại nhanh chóng làm mờ ống kính. Vì vậy, hệ thống camera cho cầu trục rót thép cần vỏ inox, kính chịu nhiệt, Air Purge và giải pháp làm mát phù hợp.
Những chi tiết này không phải lúc nào cũng nổi bật trên bản vẽ tổng thể, nhưng lại quyết định độ tin cậy của hệ thống sau nhiều năm vận hành.
Xem đầy đủ thông tin dự án: NHÀ MÁY THÉP HÒA PHÁT CẦU TRỤC RÓT THÉP 75/20 TẤN
Tại dự án Cầu Trục Rót Thép 75/20 tấn – Nhà Máy Thép Hòa Phát (khẩu độ 19,5m, chiều cao nâng 19m, 02 bộ), thách thức thiết kế không nằm ở việc đạt chính xác từ ngày đầu. Thách thức thực sự là đảm bảo kiến trúc định vị đủ tin cậy để hệ thống vận hành ổn định qua từng ca sản xuất, từng năm hoạt động của nhà máy, không phụ thuộc vào điều kiện lý tưởng nào.
Khi định vị chính xác là điều kiện tiên quyết cho vận hành không cabin
Trong mô hình Cabinless Crane — người vận hành rời khỏi cabin nguy hiểm và điều khiển từ phòng điều khiển mát mẻ dưới mặt đất qua hệ thống camera công nghiệp — dữ liệu định vị không còn là thông tin hỗ trợ. Nó là dữ liệu duy nhất để hệ thống ra quyết định an toàn.
Khi người vận hành không thể nhìn trực tiếp vào tải, mọi quyết định di chuyển đều dựa trên: tọa độ thực tế của cầu trục, trạng thái Zone Interlocking và hình ảnh từ hệ thống camera đa góc nhìn. Trong kiến trúc tích hợp RCOS trên cầu trục rót thép VINALIFT, 6 camera được bố trí theo sơ đồ đã được tính toán qua Digital Twin Simulation trước khi lắp đặt — bao gồm 2 camera PTZ theo dõi tải hai bên, 2 camera cố định nhìn về hướng di chuyển, và 2 camera góc rộng nhìn từ trên xuống. Layout camera tự động chuyển đổi theo trạng thái vận hành: khi cầu trục di chuyển dọc nhà thì ưu tiên góc nhìn hành trình, khi dừng để móc tải thì chuyển sang quad view 4 camera xung quanh điểm móc.
Hệ thống điều khiển từ xa kết nối với mạch an toàn cầu trục qua giao thức PROFISafe — đảm bảo nút dừng khẩn cấp tại Remote Control Station hoạt động với độ tin cậy tương đương cabin vật lý, ngay cả khi khoảng cách giữa người vận hành và cầu trục là hàng chục mét.
Đây là hướng phát triển tiếp theo mà VINALIFT đang triển khai: từ định vị chính xác → Go-To Position → Zone Interlocking → Cabinless Crane → tích hợp hoàn toàn vào Smart Steel Mill.
Từ định vị chính xác đến Smart Steel Mill
Một hệ thống định vị hiện đại không hoạt động độc lập. Trong các dự án Smart Steel Mill, dữ liệu vị trí thường trở thành một phần của kiến trúc điều khiển tổng thể thay vì chỉ phục vụ riêng cho cầu trục.
Trên thực tế, dữ liệu định vị thường được tích hợp với:
- Anti-Sway
- Camera Low-Latency
- CMS (Crane Management System)
- SCADA
- MES
Khi hệ thống MES phát lệnh vận chuyển vật liệu, cầu trục không đơn thuần thực hiện một thao tác nâng hạ. Toàn bộ chuỗi dữ liệu và điều khiển phía sau sẽ cùng tham gia vào quá trình này.
Hành trình được tính toán tự động. Điều kiện an toàn được xác nhận bởi Zone Interlocking. Hệ thống định vị liên tục xác thực vị trí thực tế. Đồng thời CMS ghi nhận toàn bộ trạng thái vận hành để phục vụ giám sát và phân tích hiệu suất.
Ở giai đoạn này, cầu trục không còn là một thiết bị cơ khí độc lập. Nó trở thành một phần của hệ sinh thái tự động hóa công nghiệp và tham gia trực tiếp vào luồng dữ liệu sản xuất của nhà máy.

Xem thêm: [Quy trình thử nghiệm nghiệm thu cầu trục rót thép chuẩn châu Âu cho EPC] — Bước 5 mô tả quy trình kiểm tra thực tế hệ thống Absolute Positioning và No-Fly Zones trước khi thiết bị xuất xưởng
Kết luận
Nhìn từ góc độ thiết kế dự án, yêu cầu đặt ra với công nghệ định vị chính xác trong cầu trục rót thép không phải là đạt sai số vài milimet trong điều kiện kiểm tra. Yêu cầu thực sự là: khi một thùng ladle 75 tấn ở 1.600°C cần đặt đúng vị trí rót, hệ thống phải cho phép điều đó xảy ra với độ tin cậy tuyệt đối.
Go-To Position, Zone Interlocking, Anti-Sway, Remote Operation, tích hợp CMS-SCADA-MES – không có chức năng nào trong số này hoạt động được nếu lớp định vị phía dưới không đủ tin cậy theo EN 13135. Đây không phải cộng thêm một tính năng. Đây là điều kiện tiên quyết để hoạt động cầu trục rót thép.
Công nghệ định vị chính xác không được đầu tư để hiển thị tọa độ trên màn hình HMI. Nó được đầu tư để làm điều mọi hệ thống luyện kim thế hệ mới phải làm được: vận hành như một phần không thể thiếu của nhà máy, ổn định, không lỗi, không phụ thuộc vào cá nhân nào, suốt vòng đời dự án.
Yêu cầu buổi review kiến trúc định vị 30 phút với kỹ sư VINALIFT
Nếu bạn đang chuẩn bị Technical Specification cho cầu trục rót thép hoặc đánh giá độ tin cậy của hệ thống định vị hiện tại, đội ngũ kỹ sư của VINALIFT sẵn sàng phân tích kiến trúc Encoder Fusion phù hợp với điều kiện vận hành cụ thể của dự án — bao gồm đánh giá rủi ro môi trường bụi graphite, yêu cầu độ chính xác theo chế độ làm việc FEM và phương án tích hợp với hệ thống MES/SCADA hiện có.
- Hotline: 039.341.6686
- Email: contact@vinalift.vn